Hyperion: A Robust Drone-Based Target Tracking System
Hyperion is a robust detect, track and follow algorithm for UASs, leveraging and integrating various computer vision techniques and a combination of two proportional integral derivative (PID) controllers for following a moving vehicle. The Hyperion system is evaluated under real settings using off-the-shelf hardware and an elaborated comparison was made with a variety of state-of-the-art trackers available in the OpenCV library.
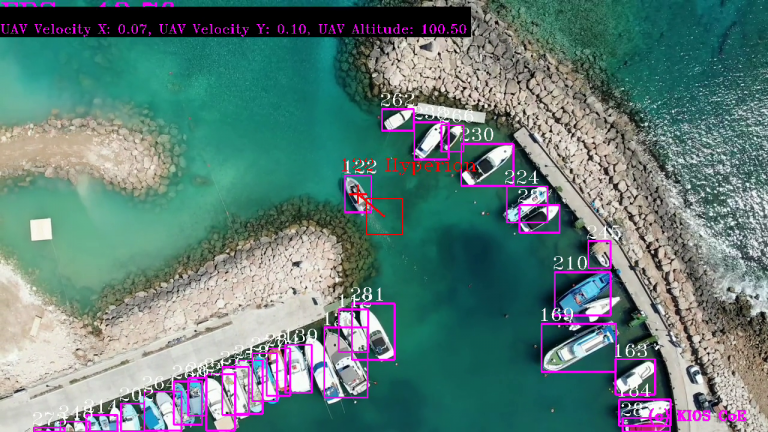
Hyperion, is a fully autonomous aerial system which is used to detect, track, and follow a moving vehicle. We assume that as soon as a UAS is in the air, detection of vehicles within the Field of View (FoV) of the onboard camera commences. Once a target has been selected from the Ground Station (GS), Hyperion starts tracking the moving vehicle and tries to vertically position the UAS above the target (i.e., aiming to always have the target within the center of the FoV). We assume that the quadcopter always faces to the North and follows the moving vehicle by applying controls to the roll and pitch axis only. This is done to keep the quadcopter in the same orientation at any given time so that a remote pilot can easily intervene and regain remote-control of the aircraft without loosing his orientation.