Onboard Data Synchronization for Multi-agent Systems
Onboard data synchronization is an important aspect of multi-agent UAV (unmanned aerial vehicle) systems, as it ensures that all UAVs in the system are working with the same set of data. This can be particularly important in applications such as surveillance or search and rescue, where the UAVs need to coordinate their actions and share information in real-time.
There are several approaches to achieving onboard data synchronization in multi-agent UAV systems. One common method is to use a central server or ground station to collect and disseminate data to the UAVs. This approach has the advantage of being relatively simple to implement, but it can be prone to delays and communication failures if the UAVs are operating in remote or challenging environments.
Another approach is to use a decentralized network of UAVs, where each UAV acts as a node in the network and is responsible for exchanging data with its neighbors. This approach can be more robust and resilient to communication failures, but it requires the UAVs to have some level of autonomy and decision-making capability.
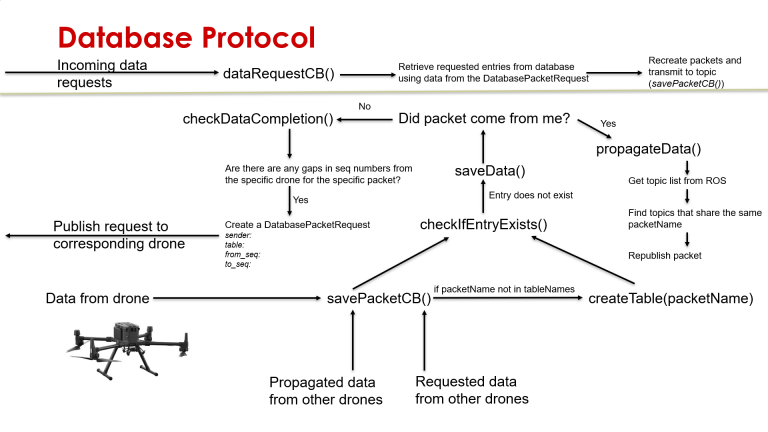
The methodology used currently takes advantage of ROS (Robot Operating System) and its features as a message-passing mechanism.
Building on top of that to provide processes for message serialization and data consistency with the ultimate goal of achieving data integrity and redundancy.
You can download the Data Synchronization Toolkit here.