Implementing Mission-Critical UAV Swarm Coordination through the Integration of LoRa and ROS Frameworks, M. Karatzia, P. Kolios, G. Ellinas, IEEE ICT-DM, 2023, Best paper runner-up award.
The operation of unmanned aerial vehicles (UAVs) has emerged as a promising enabling technology in many mission-critical operations. The ability of UAVs to communicate is essential for receiving and transmitting commands, telemetry data, and other payload information. This work proposes a wireless communication system using an integrated LoRa-ROS (long range communication – robot operating system) implementation of the two popular protocols for communication and coordination, respectively. The system is designed for UAV-to-X (UAV/GCS – ground control station) applications. The LoRa protocol, with its long-range and low-power features, is well-suited for UAV-to-X communication, especially in remote or rural areas, or during disasters, where the traditional cellular/WiFi networks are unavailable or unreliable. At the same time, ROS provides the necessary software framework to orchestrate the behavior of the UAVs and ensure seamless multi-agent coordination. The developed prototype system is implemented and empirically tested on a number of UAVs and ground control stations, and the results demonstrate the feasibility and effectiveness of the proposed solution.
Unmanned aerial vehicles (UAVs), are aerial vehicles that can be controlled autonomously by onboard computers or remotely by a ground control station (GCS). UAVs have been instrumental in transforming numerous industries and applications involving remote sensing and disaster management (including search-and-rescue operations) [1]. UAVs offer distinct advantages over manned aircraft in critical missions, including enhanced safety, increased flexibility, quicker response times, and reduced operational costs.
To achieve efficient coverage of large areas with minimal human intervention, the deployment of multiple UAVs that can coordinate and operate in swarms has been heavily investigated in recent years. Swarms offer several advantages as compared to single-agent systems, such as improved situational awareness and increased robustness for highly-dynamic scenarios with uncertain outcomes. However, for UAV swarms to function effectively, it is crucial to establish and maintain reliable communication links between the agents within the swarm.
Effective communication between UAVs and their ground-based operators is crucial for successful mission execution, especially during disaster management scenarios where conventional communications infrastructure may be severely damaged. These communication links are critical for coordination and control of their flight paths, receiving real-time data from on-board sensors, and monitoring the UAVs’ status. Various communication protocols and technologies have been proposed in the literature for multi-agent UAV architectures, including Wi-Fi, VHF/UHF radio frequencies, cellular (e.g., LTE, 5G), satellite links, and LoRa/LoRaWAN, amongst others [2], [3]. However, determining the most appropriate communication protocol for a particular application is a complex matter, as it is highly dependent on the network architecture and deployment location, such as urban or rural areas. Additionally, there are several challenges that must be addressed, including mobility, topology, and energy efficiency [4].
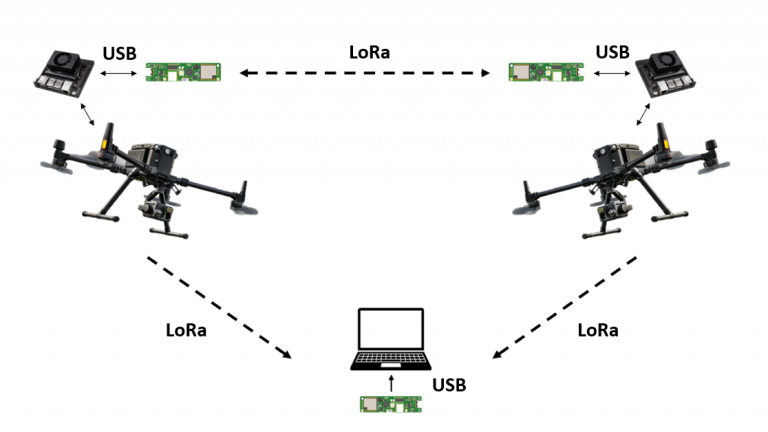
Motivated by the aforementioned challenges, this work proposes a novel communication system for UAVs that addresses the challenges associated with both multi-UAV architectures and UAV-to-ground communication, aiming to optimize UAV-to-X communication, especially during mission-critical operations such as the management of a disaster. Initially, a general networking architecture is proposed, based on the LoRa protocol, and LoRa, in conjunction with ROS, are used to facilitate UAV-to-UAV (U2U) and UAV-to-GCS communication.