Workpackages
WP1: Project Managment
The main objective of this work-package is to assure the unhindered progress of the proposed scientific and general objectives of the project by providing appropriate management and administrative support.
WP2: Dissemination of Results
The objectives of WP2 are the exploitation and dissemination of the produced knowledge that will arise from the project.
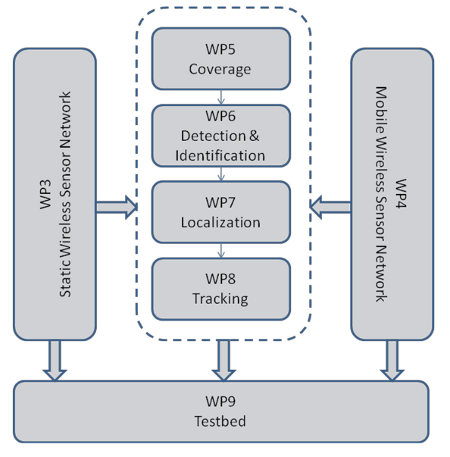
WP3: Wireless Sensor Network Architecture
The objective of this WP is to address some of the important research challenges in designing a Wireless Sensor Network (WSN) for detecting identifying, locating and tracking event sources. The challenges that will be addressed include sensor node localization, dynamic clustering, routing and data aggregation.
WP4: Agent Collaboration
The objective of this WP is to address some of the important research challenges in designing algorithms for allowing a group of autonomous agents to collaborate in order to achieve a common goal. Furthermore, we will investigate and develop information exchanging techniques to optimize wireless communication of the agents without affecting the overall performance of the WSN.
WP5 : Collaborative Coverage
The main objective of this WP is to develop an efficient distributed collaboration scheme for a team of autonomous mobile sensor nodes which enables them to navigate in searching for events and improving area coverage. The specific goals are (a) to develop a collaborative searching method with ultimate goal to detect an event that occurred in an environment (b) to investigate collaboration schemes between the sensor nodes such that each mobile samples areas not covered by the stationary or other mobile nodes and (c) to reduce the amount of information that is needed to be exchanged between nodes without significant loss of performance (in terms of area coverage or detection probability).
WP6: Collaborative Detection and Identification
The objective of this WP is to collaboratively detect and correctly identify the presence of multiple event sources. For identification, the main objective is to count the number of sources. Fault tolerance is of primary importance for designing the detection and identification algorithms of this WP - the algorithms should retain their performance even when a large percentage of the sensor nodes report erroneous observations.
WP7: Collaborative Localization
The main objective is to derive collaborative algorithms that will enable both a static and a mobile WSN to localize an event source. First, we will investigate events with Gaussian distribution and uniform propagation. Then, we will consider plume sources which have more realistic propagation characteristics in the context of environmental monitoring. For plume sources, localization is also referred as tracing the contaminant transport back to the source. Additionally, for mobile WSNs it will be researched whether the formation of the group can improve the performance of the algorithms.
WP8: Collaborative Tracking
For this WP consider source(s) that are moving. For each of the event sources identified in WP6, the objective here is to continuously track the source locations.
WP9: Design and construct a lab test-bed
The main objective is to design and construct the robotic agents of a mobile WSN. These agents will form a small scale mobile WSN for laboratory testing and demonstration of the algorithms that will be developed in this project.