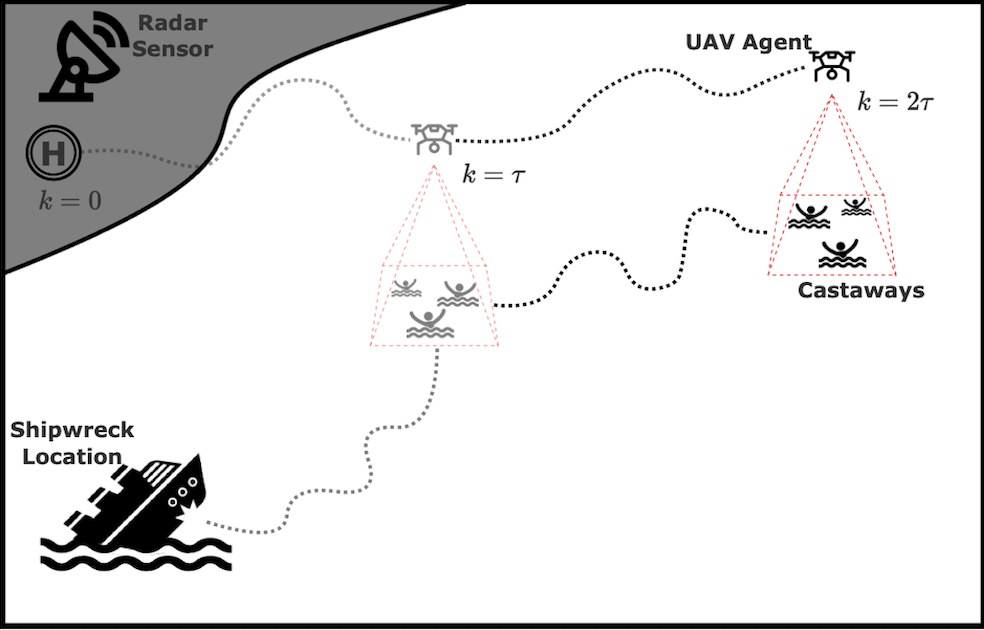
This task dives into the challenging problem of multiple castaway tracking using multiple autonomous drone agents. Leveraging on the computing power of the modern embedded devices, we propose a model-predictive control (MPC) framework for tracking multiple castaways assumed to drift afloat in the aftermath of a maritime accident. We consider a stationary radar sensor that is responsible for signalling the search mission by providing noisy measurements of each castaway’s initial state. Each drone agent aims at detecting and tracking the moving targets with its equipped onboard camera sensor that has limited sensing range. Our approach generates the control inputs of the drone-agents in an on-line fashion in order to minimize the overall tracking error and account for each castaway’s predicted location uncertainty, through a non-linear mixed integer MPC formulation. In this work, we also experimentally determine the probability of target detection from real-world data by training and evaluating various convolutional neural networks (CNNs).
Overall, the key contributions of this work are the following:
- We propose a MPC framework, that allows a team of autonomous flying agents to track multiple castaways. To achieve this, we formulate a non-linear mixed integer program to compute the optimal control inputs of the agents over a finite rolling planning horizon, which minimizes the tracking error over all castaway targets.
- We have experimentally analyzed the target detection probability using water buoys, by training various CNNs from images taken by the drones from various altitudes. From the evaluation of the CNNs, we constructed a piece-wise linear function that describes the confidence of detection probability based on the drone altitude.
- Finally, the creation of a new open-source dataset that consists of aerial images, of water buoys taken with a drone from various altitudes above the sea level. Different wave conditions have also been captured in order to create a machine learning object detection algorithm that reflects on the challenges of castaway detection in marine environments.
The details of the proposed approach can be found in the references listed below.
References: