In this project, we envision that a team of autonomous flying robots (i.e., drones) or unmanned aerial vehicles (UAVs) could become an essential technological tool to revolutionize search-and-rescue (SAR) missions through autonomous functionalities enabled by Artificial Intelligence (AI). Currently, drones serve merely as an “eye in the sky” providing only a bird’s eye view of the situation at hand using camera payloads. Decisions are solely based on the human operator, which analyses the received data and gives an expert opinion of the situation on the ground. This project aims at developing the theory and tools, that could help transform an aerial vehicle into an intelligent autonomous life-saving machine.
Main Goal
Conduct cutting-edge research in the field of autonomous multi-agent systems and artificial intelligence to revamp search-and-rescue operations with a fleet of autonomous flying robots.
The primary objectives of this project is to research and develop novel AI-based algorithms and cooperative control techniques to address fundamental challenges in the use of a fleet of drones in SAR missions and enable this promising technology to go well beyond the current state-of-the-art and ultimately support first responders in their operations. The main goals of this project are the following:
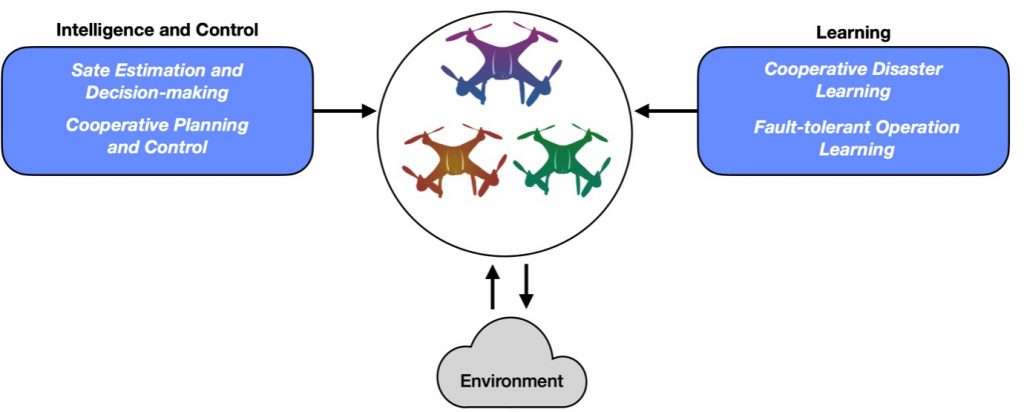
- Design a robust multi-agent mathematical modeling framework for autonomous intelligent decision making and cooperative control in uncertain emergency response missions.
- Propose novel learning methods that will enable a multi-drone system to operate robustly in challenging disaster environments.
- Increase the level of autonomy through intelligent multi-robot task-planning and cooperation techniques for disaster environments.
- Devise methods that enable rapid and continuous situational awareness for the disaster management teams through an AI-based autonomous multi-drone system.