This task introduces a cooperative inspection system designed to efficiently control and coordinate a team of distributed heterogeneous UAV agents for the inspection of 3D structures in cluttered, unknown indoor and outdoor spaces. Our proposed approach employs a two-stage innovative methodology. Initially, it leverages the complementary sensing capabilities of the robots to cooperatively map the unknown environment. It then generates optimized, collision-free inspection paths, thereby ensuring comprehensive coverage of the structure’s surface area. The effectiveness of our system is demonstrated through qualitative and quantitative results from extensive Gazebo-based simulations that closely replicate real-world inspection scenarios, highlighting its ability to thoroughly inspect real-world-like 3D structures.
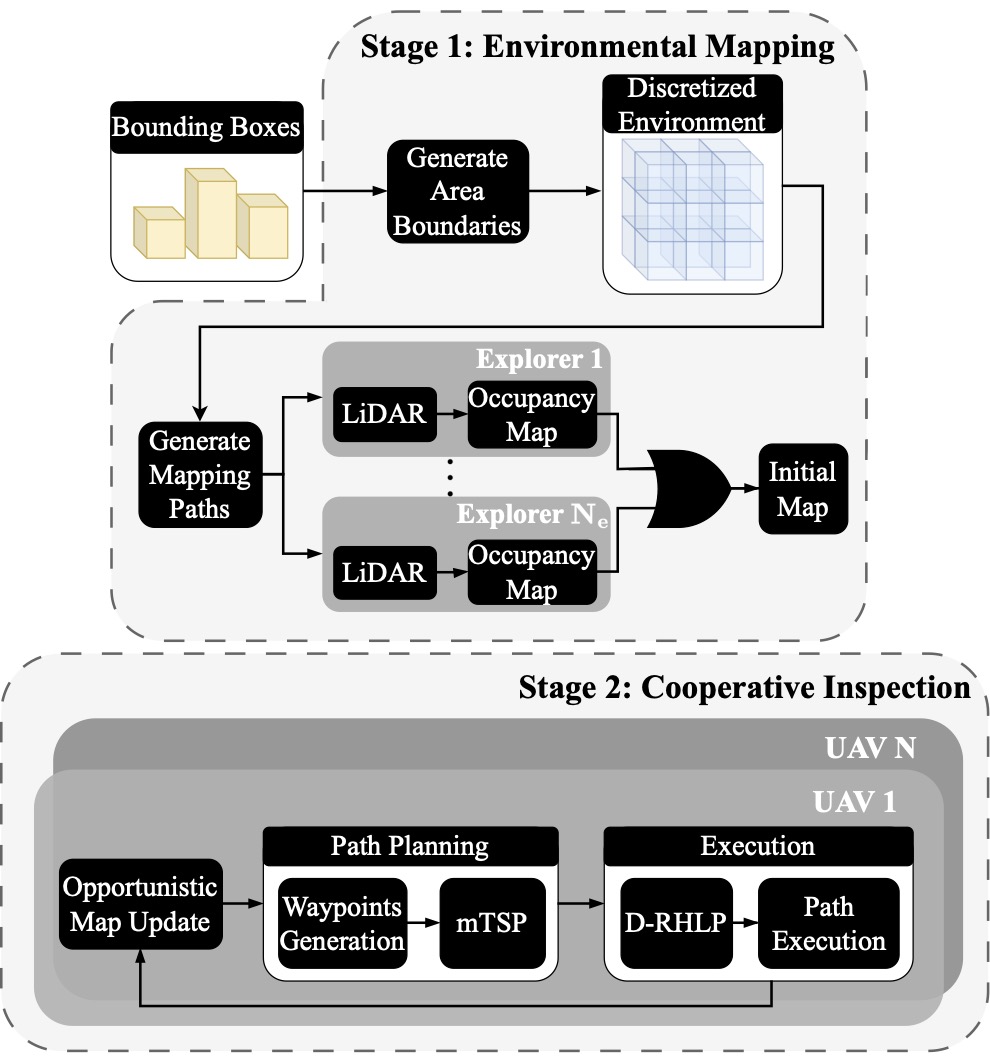
Specifically, we designed and developed a multi-drone exploration strategy employing a team of UAVs to explore and inspect 3D infrastructures. We utilized two types of quadrotor UAVs: explorer UAVs and photographer UAVs. Explorer UAVs are equipped with both a LiDAR sensor, which collects measurements about the surrounding environment, and a gimballed camera sensor for inspecting the surface of a 3D structure. Photographer UAVs, significantly smaller than explorer UAVs, carry only a camera sensor used during the inspection. The strategy is based on a two-stage approach: the first stage involves the reconstruction of the 3D space, while the second stage focuses on inspecting any infrastructure found within the reconstructed 3D space. This strategy aims to maximize the space explored collaboratively by the team of explorer UAVs while reducing the total exploration time.
The key contributions of the proposed scheme are as follows:
a) We propose a cooperative inspection system designed for the efficient coordination and control of a distributed team of heterogeneous UAV agents assigned to inspect 3D structures in complex, cluttered indoor and outdoor environments. Our approach employs a two-stage strategy. Initially, it leverages the heterogeneous sensing capabilities of the UAVs to cooperatively map the unknown environment. Subsequently, it generates cooperative, collision-free inspection paths in real time, thereby ensuring full coverage of the structure’s surface area.
b) The effectiveness of our system is demonstrated through extensive qualitative and quantitative results from Gazebo-based simulations. These simulations closely replicate real-world inspection scenarios, underscoring the system’s capability and practicality to thoroughly inspect 3D structures that closely resemble those found in the real-world settings.
The proposed system participated in the Cooperative Aerial Robots Inspection Challenge (CARIC) at the flagship 62nd IEEE Conference on Decision and Control (CDC 2023), held in Singapore from December 13-15, 2023, and won the First Prize.
The details of the proposed approach can be found in the references listed below.
References: