The work proposed in this project has the goal of developing a novel mathematical framework that will enable intelligent decision-making, planning, and learning algorithms to be realized by a cooperating fleet of autonomous drone agents. Specifically, the project will develop a generalized state-estimation and decision-making framework that will enable intelligent reasoning in uncertain disaster environments, on top of which cooperative control, planning, and exploration algorithms will be developed along with disaster monitoring, and learning techniques. The proposed research plan is organized into two main inter-related technical work-packages (WPs), as shown in the figure below, covering:
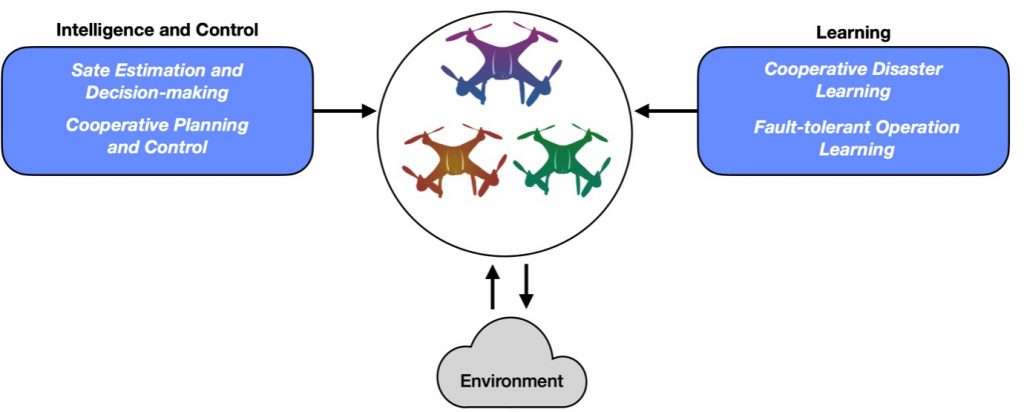
- The implementation of a multi-agent mathematical modelling framework for reliable state-estimation, inference and decision-making, along with the design of intelligent cooperative planning and control techniques:
- Multi-drone Estimation and Intelligent Decision making framework: Design efficient multi-drone estimation and decision-making techniques for: a) estimating the states of multiple objects of interest in uncertain disaster environments (e.g., with noisy measurements) and b) optimally taking decisions under uncertainty.
- Multi-drone Cooperative Guidance and Planning: Design intelligent guidance and planning techniques that will enable a team of cooperative agents to efficiently navigate the mission space of challenging disaster environments.
- Multi-drone Indoor and Outdoor Mapping, Exploration, and Inspection: Design efficient methodologies for multi-drone mapping, exploration, and inspection. Develop optimal strategies for multi-drone exploration aimed at achieving specific mission objectives. The proposed approach should be designed to maximize the area explored collaboratively by the drone swarm while simultaneously reducing the total exploration time.
- The design of learning-based approaches for efficient disaster monitoring with a cooperative team of autonomous drone agents, disaster learning (i.e., wildfire spread model learning) and fault-tolerant operation:
- Wildfire cooperative monitoring: Design algorithms that will enable a team of flying agents equipped with proper hardware for localization and fire detection (e.g., GPS, IMU, high-resolution camera) to monitor in real-time the wildfire evolution and continuously update the mission control with the fire state.
- Wildfire spread model learning: Investigate how a team of cooperative autonomous agents can learn the wildfire spread model and how to use this model for better fire monitoring and decision making.
- Real time situational awareness: Design methods for effective monitoring of assets and resources including first responders and means during large-scale disaster situations. Implement risk inference techniques to guide first responders promptly and continuously to safe operating areas while maximizing their performance in the field.
- Fault-tolerant operation: Devise fault-tolerant planning and control techniques that address various types of faults occurring during planning and execution, such as those encountered in wildfire monitoring and coverage tasks. We aim to explore how different stochastic disturbances (e.g., disturbances arising from various probability distributions) can be integrated into the planning process to ensure robust operation. This approach will enable the system to predict and, to some extent, anticipate persistent disturbances during real-time operations, thereby enhancing fault tolerance and ensuring mission continuity.