This work develops a novel distributed multi-drone cooperative guidance framework, where a dynamically varying team of autonomous agents cooperate in order to search multiple objects of interest in 3D. It is assumed that the agents can enter and exit the mission space at any point in time, and as a result the number of agents that actively participate in the mission varies over time. The proposed distributed search-planning framework takes into account the agent dynamical and sensing model, and the dynamically varying number of agents, and utilizes model predictive control (MPC) to generate cooperative search trajectories over a finite rolling planning horizon. This enables the agents to adapt their decisions on-line while considering the plans of their peers, maximizing their search planning performance, and reducing the duplication of work. The performance of the proposed approach is demonstrated through extensive simulation experiments.
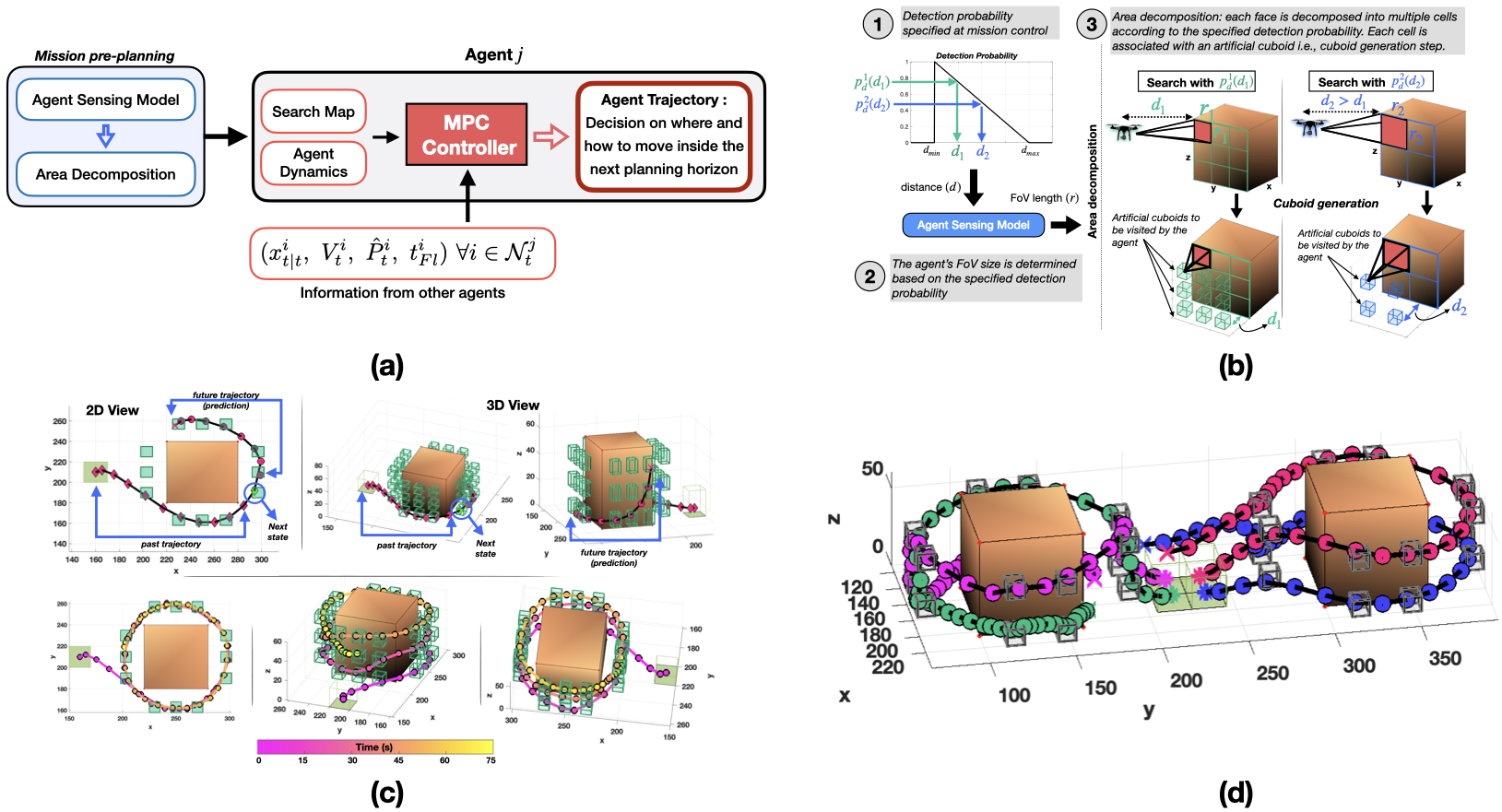
(c) guidance and planning with single agent, (d) cooperative planning with 4 agents.
Overall, the contributions of this work are as follows:
- We propose a novel distributed search planning framework, based on model predictive control (MPC), which enables a dynamically varying number of autonomous agents to cooperatively search in 3D multiple objects of interest, without requiring any form of coordination.
- We derive a mixed-integer quadratic programming mathematical formulation for the distributed 3D search planning problem which can be solved efficiently with widely available optimization tools.
- Finally, the performance of the proposed approach is demonstrated through a series of qualitative and quantitative synthetic experiments
The details of the proposed approach can be found in the references listed below.
References:
- S. Papaioannou, P. Kolios, T. Theocharides, C. G. Panayiotou and M. M. Polycarpou, “Distributed Search Planning in 3-D Environments With a Dynamically Varying Number of Agents,” in IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, doi:10.1109/TSMC.2023.3240023.
- S. Papaioannou, P. Kolios, T. Theocharides, C. G. Panayiotou and M. M. Polycarpou, “Integrated Guidance and Gimbal Control for Coverage Planning With Visibility Constraints,” in IEEE Transactions on Aerospace and Electronic Systems, 2023, doi:10.1109/TAES.2022.3199196.
- Angelos Zacharia, Savvas Papaioannou, Panayiotis Kolios and Christos Panayiotou, “Distributed Control for 3D Inspection using Multi-UAV Systems,” in Proceedings of the 31st Mediterranean Conference on Control and Automation (MED), June 26-29, 2023, Limassol, Cyprus.
- Savvas Papaioannou, Panayiotis Kolios, Theocharis Theocharides, Christos G. Panayiotou, and Marios M. Polycarpou, “Cooperative Receding Horizon 3D Coverage Control with a Team of Networked Aerial Agents”, 2023 62nd IEEE Conference on Decision and Control (CDC), Singapore, Singapore, 2023