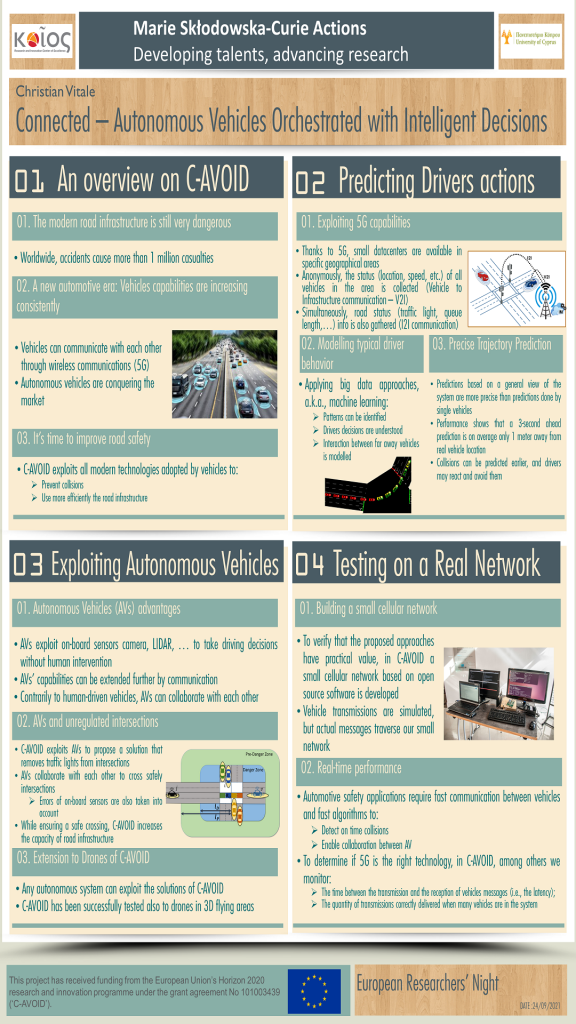
The MSCA Fellow Christian Vitale participates in the European Researchers’ Night 2021, CYPRUS, Cyprus. Due to COVID restrictions, this year the event will be held virtually. Check out the material that you will find at the C-AVOID stand!
 c-avoid
c-avoidThe MSCA Fellow Christian Vitale participates in the European Researchers’ Night 2021, CYPRUS, Cyprus. Due to COVID restrictions, this year the event will be held virtually. Check out the material that you will find at the C-AVOID stand!
The paper “Real-time Trajectory Planning for Managing Demand and Safety during the Crossing of an Intersection by Connected Autonomous Vehicles” was presented virtually at IEEE ITSC 2021, held in Indianapolis.
Our network-assisted vehicle trajectory estimation at intersections has been accepted for publication at the IEEE VTC2021-Fall conference!
D. C. Selvaraj, C. Vitale, T. Panayiotou, P. Kolios, C. F. Chiasserini and G. Ellinas, “Edge Learning of Vehicular Trajectories at Regulated Intersections,” 2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall), 2021, pp. 1-7, doi: 10.1109/VTC2021-Fall52928.2021.9625570.
Our optimization framework for Autonomous Intersection Management has been accepted for publication at IEEE ITSC 2021!!! Check us out!
C. Vitale, P. Kolios and G. Ellinas, “Real-time Trajectory Planning for Managing Demand and Safety during the Crossing of an Intersection by Connected Autonomous Vehicles,” 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), 2021, pp. 2533-2540, doi: 10.1109/ITSC48978.2021.9565114.
Our GPS Spoofing detection technique has been accepted for publication in the EURASIP Journal on Wireless Communications and Networking. Check us out!!!
Vitale, C., Piperigkos, N., Laoudias, C. et al. CARAMEL: results on a secure architecture for connected and autonomous vehicles detecting GPS spoofing attacks. J Wireless Com Network 2021, 115 (2021). https://doi.org/10.1186/s13638-021-01971-x
https://jwcn-eurasipjournals.springeropen.com/articles/10.1186/s13638-021-01971-x
In an attempt of opening new collaborations and extend the scope of the project, C-AVOID held a meeting with Politecnico di Torino to present and disseminate the project objectives and research activities. Carla-Fabiana Chiasserini, Christian Vitale, Panayiotis Kolios, and Georgios Ellinas participated in the meeting.
The paper “Intersection Crossing with Connected Autonomous Vehicles under Location Uncertainty” was presented virtually at IEEE GLOBECOM 2020, held in Taiwan. The publication was included in the Selected Area in Communications: Internet of Things and Smart Connected Communities.
Christian Vitale, Panayiotis Kolios, Georgios Ellinas. “Intersection Crossing with Connected Autonomous Vehicles under Location Uncertainty”. In the 2020 IEEE Global Communications Conference: Selected Areas in Communications: Internet of Things and Smart Connected Communities (IEEE GLOBECOM 2020), December 2020.
The H2020 C-AVOID Project is now on CORDIS! Check the information at https://cordis.europa.eu/project/id/101003439
Follow the latest updates on our project on its dedicated page on ResearchGate! Comments and feedback are welcome!